Kuidas valida servoajamit?
Kuidas valida servoajamit?
Anname ülevaate kuidas valida servoajamit. Mis see on ja miks ühte või teist süsteemi osa tuleb jälgida.

Artikli alguses on toodud definitsioonid ja servoajami kirjeldus. Artikli teises pooles on toodud juhised kuidas valida.Kui mehhanismi liikumist peab juhtima korratavalt, väga täpselt, tundlikult ja kiiresti, siis tuleb kasutada servoajameid. Neid kasutatakse näiteks CNC-seadmetes, tööpinkides, automaatliinides ja tööstusrobotites.
Servomootor saab energiat toitemuundurist (servovõimendist või -inverterist), mida juhitakse kontrolleriga. Servomootori küljes on asendiandur – enkooder või resolver, mis väljastab juhtkontrollerile rootori pöördenurga infot vastavalt impulssidega, jadakoodina või siinus- ja koosinussignaalidega.
Servoajami komponentidest
Servoajamiks nimetatakse pöördenurga anduriga servomootorist, ülekandemehhanismist, toitemuundurist ja juhtkontrollerist koosnevat tagasisidestatud süsteemi.
Servomootor
Servomootorid on enamasti suhteliselt peene ja pika võlliga, et inertsimoment oleks võimalikult väike. Kõige paremini vastavad kiiretoimelisuse ja kompaktsuse nõuetele püsimagnet-sünkroonmootorid, kuna nende magnetväli on tekitatud püsimagnetitega. Seega ergutuse magnetvälja tekitamine ei nõua neil täiendavat energiat, aega ega ruumi.
Servomootor on sama võimsusega tööstuslikust asünkroonmootorist mõõtmetelt väiksem ja oluliselt kiiretoimelisem, kuna levinuimal servomootoril – püsimagnet-sünkroonmootoril – kasutatakse magnetvälja tekitamiseks ülitugevaid neodüüm- või samaarium-koobalt-püsimagneteid. Tänu sellele pakub servomootor suuremat pöördemomenti ja palju väiksemat inertsimomenti kiirendamisel ja aeglustamisel. Servomootoreid on saada ka elektromagnetiliselt vabastatava vedru-hoidepiduriga ehk passiivpiduriga, et säilitada mootorivõlli asend toite puudumisel või peatada avariiseiskamisel.
Servomootor peab olema kompaktne ja võimas. Suure võimsuse saavutamiseks peavad nii pöördemoment kui pöörlemiskiirus olema võimalikult suured.
Reduktor
Mehhanismi ja mootorivõlli kiiruste ja momentide sobitamiseks on vajalik reduktor. Eriti väikese inertsmomendi, suure tugevuse ja väikese lõtku tõttu sobivad servoajamitesse kõige paremini planetaarreduktorid. Need võivad olla samateljelised ehk koaksiaalsed või ka täisnurksed täiendava koonushammasratasastmega nn T-reduktorid. Kui täpsuse ja kiiretoimelisuse nõuded võimaldavad, saab servoajamites kasutada ka üldtööstuslikke hammasratasreduktoreid. Tigureduktoreid servoajamites ei kasutata, kuna madala kasutegur vähendab pöördemomenti, tiguratas ei sobi piiratud liikumiseks, lõtk ja inertsimoment on suured.
Reduktori kasutamine servoajamis on üldjuhul majanduslikult tasuv. Vahel kasutatakse siiski ka reduktorita lahendusi, kui on vaja täiesti lahti saada lõtkudest või tahetakse saavutada kõrgemat täpsust, kiirust, töökindlust või hooldusvabadust. Paratamatult tuleb reduktorita lahenduses kasutada kordades võimsamat servomootorit ja -muundurit, mis peavad suutma tekitada vajalikku pöördemomenti ilma reduktorita. Mootori maksimaalne võimsus jääb reduktorita lahenduses reeglina kasutamata, kuna kiirus jääb väikeseks. Sellegipoolest reduktorita lahendusi kasutatakse üsna palju, eriti väiksemates suure täpsusega lineaarsetes servoajamites.
Servokontroller
Hajusjuhtimisel ja üksikajamites kastatakse servokontrollereid ehk servodraive, milles toitemuundur ja juhtkontroller on teostatud ühtse seadmena. Kesksetes ehk tsentraalsetes mitmeteljelistes servosüsteemides otstarbekam jätta servokontrollerisse minimaalselt juhtimisfunktsioone ja kasutada keskset liikumiste juhtimise kontrollerit, mis kasutab telgede servokontrollerite juhtimiseks kiiret reaalaja andmesidet, näiteks EtherCAT või CANopen.
Oma tööpõhimõttelt on servokontroller väga sarnane tööstuses vahelduvvoolumootorite kiiruse juhtimiseks kasutatavale sagedusmuundurile, mis samuti koosneb kolmefaasilisest vaheldist ja mikroprotsessor-juhtimissüsteemist. Servokontrolleri peamised erinevused seisnevad kiiretes asendiandurite liidestes, spetsiaalsetes juhtimisalgoritmides, mis võimaldavad eriti täpset kiiruse, asendi või pöördemomendi juhtimist, liikumistrajektooride planeerimist, kõigi juhtimistasemete regulaatorite automaathäälestusi; sisaldavad tüüprakenduste makroprogramme jpm. Hajusjuhtimise ehk detsentraalse servokontrolleri juhtimissüsteemi riist- ja tarkvara on võimekam kui sagedusmuunduril.
Servoajamitel on suurepärane asendi, kiiruse ja pöördemomendi reguleerimistäpsus, eriti suur ülekoormatavus ja teised dünaamilised omadused, mis annavad servoajamitele suured eelised, võrreldes sagedusjuhtimisega tööstuslike asünkroonmootoritega.
Servokontrollerid rakendavad suure kiirusega keerukaid arvutusi reaalajas,
et mootori liikumistrajektoori ja etteandekiirust kogu aeg korratava täpsusega järgitaks. Et võtta servokontrolleri ja -mootori parimatest dünaamilistest karakteristikutest viimast, on vaja kontrolleri regulaatoreid optimaalselt häälestada. Enamus tootjatel servokontrolleritel on automaathäälestuse funktsioonid olemas, kuid need ei puugi garanteerida parimat tulemust, eriti kui mehhanismis on lõtkud või elastsused. Võivad tekkida ebatäpsused ja võnkumised, mis kergemal juhtumil suurendavad energiakulu, kuid raskematel juhtudel võivad servoajami või töömasina osi purustada või nende eluiga järsult lühendada. Kuna iga rakendus on erinev, on vahel ikkagi vaja servokontrolleri regulaatoreid käsitsi seadistada vastavalt dünaamilistele nõuetele, et suurused ei võnguks ja positsioneerimisaeg ja –viga oleks minimaalne. Siin on jällegi abi konkreetse servoajami kasutamise ja häälestamise kogemustest ning arendustarkvara diagnostika võimalustest.
Servokontrolleri valikul tuleb pidada silmas, kas servokontroller on universaalne või spetsiaalne. Universaalse servokontrolleriga saab juhtida mitmete levinumate tootjate erinevat tüüpi servomootoreid. Nt Lenze servokontrollerid on universaalsed. Spetsiaalne servokontroller aga saab juhtida ühte või kitsast valikut servomootoreid. Näiteks firma Delta Electronics servokontrollerid sobivad ainult 3-4 tüüpi sama firma servomootoritele. Spetsiaalne kontroller on oma mootori jaoks optimeeritud ja tagab servomootori võimekuse maksimaalse ärakasutamise minimaalse riist- ja tarkvaraga, mis annab hinnaeelise. Puuduseks on see, et teiste tootjate mootoreid kasutada ei saa. Näiteks teise tootja servomootoritega seadme moderniseerimisel tuleb ka mootorid vahetada.
Servokontrolleri puhul tuleb kontrollida mõõtmed, et see mahub koos pistikute ja kaablitega nõutud vahedega elektrikilpi vm paigaldades. Kui servokontrollerit ei paigaldata elektrikilpi, tuleb tagada sellele paigalduskohas nõutav IP-aste. Töömasina liikumise täpsusnõuete täidetavuse kontrollimisel on oluline servomootori asendianduri nt enkoodri piisav lahutusvõime (impulssi pöörde kohta). See peaks täpsuse ja sujuvuse tagamiseks olema vähemalt 2 korda suurem kui nõutud täpsuse tagamiseks minimaalselt vajalik.
Servokontroller on keerukas kõrgtehnoloogiline seade, mille kasutamine eeldab spetsiaalseid teadmisi ja koolitust vastava tootja juures. Masinaprojekteerijal reeglina ju neid eriteadmisi pole. Kuidas ta siis peaks servoajamit valima?
Kuidas valida servoajamit oma rakenduse jaoks?
Kuna servoajamite valik on lai, siis tuleks esmalt põhjalikult kirja panna ja läbi kaaluda masina lõppkasutaja tehnilised nõuded, sh masina vajalik garantiiaeg, projekteeritud kasutusaeg aastates ja töötsüklites, kasutuskoha keskkonnatingimused, varasem kogemus teatud marki servoajamitega, tehnilise toe kättesaadavus jne. Parematel tootjatel on olemas programmid või äpid servoajami valikuks. Ajamisüsteemi projekteerimisel peab alati arvestama kõige ebasoodsamate tingimustega. Kõige suurem kiirus, kõige lühem kiirendusaeg, maksimaalne koormus jne. Juhtivad servoajamite tootjad pakuvad ka projekteerimistarkvarasid, millega saab arvutada popularsemaid rakendusi. Peab aga arvestama, et need lahendused ei pruugi sobida kõigile. Väga oluline on aru saada kogu infost, mida need programmid kasutajalt küsivad. Kasvõi ühe vigase lähteandme korral on arvutus tavaliselt kasutu.
Servokontrollerite erinevate markide ja mudelite tehniline võimekus ja hind varieeruvad üsna laiades piirides. Seadme remondil, mis on Eestis põhiline, tuleb kasutada võimalikult täpselt sama tüüpi servoajami komponente või tootja soovitavaid varasemale maksimaalselt vastavaid asendusi.
Üksiku seadme projekteerimisel või ka moderniseerimisel tuleks eelistada paindlikumat ja võimalikult laiemate võimalustega servokontrollerit, sest nõudmised ja vajadused võivad arendustöö, katsetuste ja häälestuse käigus muutuda. Kui servoajami võimete piir tuleb ette, võib olla vajalik väga kulukas üleminek võimekamale mudelile. Seeriaviisiliselt toodetavatele masinatele, mille hinnas servoajamil on oluline osa, on mõttekas otsida välja nii hinnalt kui tehnilistelt omadustelt võimalikult täpselt sobiv servoajami tüüp.
Mootori valik
Mootori valik algab mehhanismide momendi- ja liikumisdiagrammide välja selgitamisega. Lähtuda tuleb esmalt mehhanismi vajalikust staatilisest ja dünaamilisest pöördemomendist ning kiirusest. Nende alusel saame arvutada servomootori vajaliku võimsuse ja teha mootori eelvaliku.
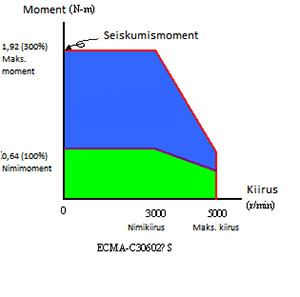
Põhiline alus servomootori valikul on selle mehhaaniline tunnusjoon ehk pöördemomendi sõltuvus pöörlemiskiirusest, mis näitab mootori dünaamilisi omadusi. Lisaks tuleb arvesse võtta, mis tingimustes suudab mootor pidevalt töötada ja millised on mootori karakteristikud lühiajalise töö korral. Nagu jooniselt näha, siis näitena toodud firma Delta Electronics 200 W servomootorist saab lühiajaliselt koormata kuni 300% nimimomendiga. Selles töörežiimis ei saa mootorit pidevalt kasutada, sõltuvalt nimimomendi ületamise väärtusest on ülekoormusel töötamise aeg mootori kaitseks piiratud servokontrolleri poolt. Tähtsamate rakenduste või suurema võimsusega servomootorid varustatakse termokaitsega.
Järgmisena tuleks koostada servomootori liikumisprofiilid vastavalt mootori karakteristikutele, et kindlustada servoajami kindel töö.
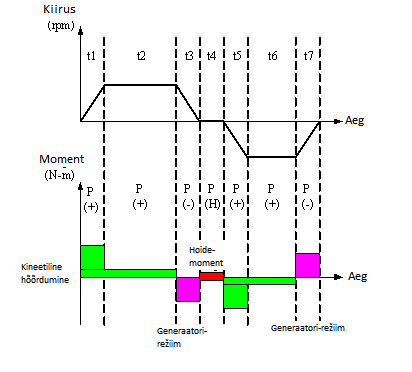
Seega enne servomootori valimist on vaja teada süsteemi mehaanilist inertsi ja liikumisprofiili, et arvutada maksimaalne süsteemi koormusmoment. Kui nende järgi on mootor valitud, tuleb leitud väärtustele lisada ka servomootori inertsmoment. Selleks tuleb koostada mehhanismi kinemaatiline mudel ja taandada kõik koormus- ja inertsmomendid servomootori võllile. Saadud väärtuste alusel saab dünaamikavõrrandist leida maksimaalse koormusmomendi, mis peab olema väiksem kui servomootori lubatud maksimaalne pöördemoment. Kuna koormusmoment muutub, tuleb koormusprofiili järgi arvutada ruutkeskmine pöördemoment, mis ei tohi ületada mootori nimivõimsust.
Kuna arvutustes sageli ei arvestata kineetilist hõõrdumist kuigi realistlikult, tuleb jätta teatav varu ka selleks. Ootamatu hõõrdejõud võib tekkida mehhaaniliste komponentide valest reguleerimisest, ebatasasustest, ebatäpsustest, võõrkehadest, puudulikust hooldusest, kulumisest, mustumisest, keskkonna temperatuurist jne. Mida väiksema võimsusega ajam, seda suurem peaks olema mootorivõimsuse varutegur.
Mootori valikul ei tohi unustada hoolega kontrollida selle füüsilisi mõõtmeid. Kui mootor koos reduktoriga masinasse ära ei mahu või tundub kahtlaselt väike, tuleb kontrollida lähteandmeid ja arvutusi ning konsulteerida tellijaga, et sobiv lahendus leida.
Reduktori valik
Mootori valiku järel saame teha reduktori arvutused ja selle välja valida. Enamasti tuleb kasutada reduktorit, et suurendada ajami pöördemomenti või vähendada mootori kiirus töömasinale sobivaks. Turul on lai valik reduktorite tarnijaid ja tüüpe. Tasub uurida konkreetse servomootori pakkujalt, mida nemad oma kogemuse põhjal eelistavad. Reduktoril tuleb täpselt kinni pidada nii väljundvõlli pöördemomendi kui lubatud radiaal- ja aksiaaljõu piirangutest.
Tuleb samuti kontrollida, et reduktori varutegur (service factor), mis väljendab reduktori suurima lubatava võimsuse ja rakenduse koormusvõimsuse suhet, on antud iseloomuga rakenduses piisav. Varuteguri väike suurendamine pikendab reduktori eluiga tugevasti. Soovitavad varuteguri väärtused erinevatele tüüprakendustele sõltuvalt kasutusajast päevas leiab reduktori kataloogist või reduktoritootja kodulehelt. Varutegur ei tohi kunagi olla alla ühe, sest seljuhul servomootor suudab reduktori enneaegselt rikkuda.
Reduktori sobitamine servomootoriga võib olla probleem, kui reduktorile pole võtta valitud mootoriga sobivaid vaheäärikuid. See on kriitiline detail, mis peab olema valmistatud väga täpselt. Ka servomootori ühendamine reduktoriga on selle tootja poolt ettemääratud peenmehhaaniline protseduur, mida tuleb täpselt järgida.
Mõned tootjad pakuvad integreeritud mootorreduktoreid, millel esimene hammasratas on juba servomootori võlli otsas. See on väga hea lahendus, kuna mootori ja reduktori vahele pole vaja sidurit ja reduktoril on üks võll koos laagritega vähem. See vähendab ajami lõtku, suurendab täpsust, töökindlust ja muudab reduktori kergemaks ja odavamaks. Tehases mootorivõllile paigaldatud hammasratas võllilt ise lahti ei tule. Miinuseks on see, et mootori asendamiseks sobib ainult täpselt samasugune toode. Servomootorid on reeglina väga vastupidavad ja kontrolleri poolt hästi kaitstud, nii et mootori vahetamist tuleb ette ainult vanadel seadmetel.
Tulevikukindluse tagamisest
Servoajam on kompleksne süsteem, mis peab omavahel täpselt kokku sobima ja korralikult toimima igas olukorras ja piisavalt kaua. Uue masina projekteerimisel tuleks alati eelistada uuemate mudelite servoajamikomponente, mida lähiaastatel tootmisest mahavõtmine ei ähvarda. Selle väljaselgitamiseks on abiks antud margi volitatud süsteemiintegraator, kellele vastavat infot pidevalt saadetakse.
Servoajam moodustab väga olulise osa tööpingi, tootmisseadme või roboti liikumiste täpsusest, korratavusest, tootlikkusest, omamiskuludest ja konkurentsivõimest. Lahendusi võib optimeerida erinevalt – nt lähtudes hinnast või tehnilisest võimekusest. Need aga asuvad kaalukausside eri pooltel, mis heas lahenduses võiks olla tasakaalus. Optimaalne servoajami lahendus saab sündida koostöös kogenud süsteemiintegraatoriga.
Energiatehnika OÜs on servoajamitele spetsialiseerunud insenerid, kes aitavad valida, koostada ja seadistada teile soovidele kõige paremini vastava servomootori, reduktori ja servokontrolleri.